Practice Problems
| Site: | Saylor Academy |
| Course: | MA005: Calculus I |
| Book: | Practice Problems |
| Printed by: | Guest user |
| Date: | Tuesday, October 22, 2024, 4:41 AM |
Description
Work through the odd-numbered problems 1-49. Once you have completed the problem set, check your answers.
Problems
1. ")
3. ")
5. )")
7. 
9. )")
11. )")
13. 
15. ")
17. }{x}")
19. ")
21. )")
23. ")
25. }\right)")
27. +\tan (\mathrm{x}))")
29. Find a point  on the graph of
on the graph of =\ln (\mathrm{x})") so the tangent line to
so the tangent line to  at goes through the origin.
at goes through the origin.
31. Rumor. The percent of a population, ") , who have heard a rumor by time
, who have heard a rumor by time  is often modeled
is often modeled =\frac{100}{1+A e^{-t}}=100\left(1+A e^{-t}\right)^{-1}") for some positive constant A. Calculate how fast the rumor is spreading,
for some positive constant A. Calculate how fast the rumor is spreading, }{\mathbf{d t}}") .
.
In problems 33 – 41, find a function with the given derivative.
33. =\frac{8}{\mathrm{x}}")
35. =\frac{\cos (x)}{3+\sin (x)}")
37. =3 \mathrm{e}^{5 \mathrm{x}}")
39. =2 x \cdot e^{\left(x^{2}\right)}")
41. =\frac{\cos (x)}{\sin (x)}")
Problems 43 – 47 involve parametric equations.
43. At time  minutes, robot
minutes, robot  is at
is at ") and robot
and robot  is at
is at ") .
.
(a) Where is each robot when  and
and  ?
?
(b) Sketch the path each robot follows during the first minute.
(c) Find the slope of the tangent line,  , to the path of each robot at minute.
, to the path of each robot at minute.
(d) Find the speed of each robot at minute.
(e) Discuss the motion of a robot which follows the path , 2 \sin (\mathrm{t})+1)") for 20 minutes.
for 20 minutes.
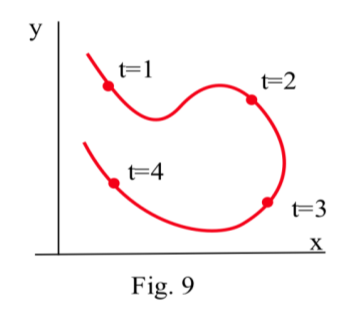
45. For the parametric graph in Fig. 9, determine whether  and
and  are positive, negative or zero when and
are positive, negative or zero when and  .
.
47. =R \cdot(t-\sin (t)), y(t)=R \cdot(1-\cos (t))") . (a) Graph
. (a) Graph , y(t))") for
for  .
.
(b) Find  , the tangent slope , and speed when
, the tangent slope , and speed when  and
and  .
.
(The graph of , \mathrm{y}(\mathrm{t}))") is called a cycloid and is the path of a light attached to the edge of a rolling wheel with radius
is called a cycloid and is the path of a light attached to the edge of a rolling wheel with radius  ).
).
49. Describe the path of a robot whose location at time is
(a) , 5 \cdot \sin (\mathrm{t}))")
(b) , \mathrm{B} \cdot \sin (\mathrm{t}))")
(c) Give the parametric equations so the robot will move along the same path as in part (a) but in the opposite direction.
Source: Dale Hoffman, https://s3.amazonaws.com/saylordotorg-resources/wwwresources/site/wp-content/uploads/2012/12/MA005-3.6-Some-Applications-of-the-Chain-Rule.pdf This work is licensed under a Creative Commons Attribution 3.0 License.
This work is licensed under a Creative Commons Attribution 3.0 License.
Answers
1. )=\frac{1}{5 \mathrm{x}} 5=\frac{1}{\mathrm{x}}")
3. \right)=\frac{1}{\mathrm{x}} \mathrm{k} \quad \mathrm{k} \mathrm{x}^{\mathrm{k}-1}=\frac{\mathrm{k}}{\mathrm{x}}")
5. ))=\frac{1}{\cos (x)}(-\sin (x))=-\tan (x)")
7. \right)=\frac{1}{5 \mathrm{x} \ln (2)}(5)=\frac{1}{\mathrm{x} \ln (2)}")
9. ))=\frac{1}{\sin (x)}(\cos (x))=\cot (x)")
11. )\right)=\frac{1}{\sin (x)} \frac{1}{\ln (2)}(\cos (x))=\frac{\cot (x)}{\ln (2)}")
13. \right)=\mathbf{D}(\mathrm{x})=1")
15. )=x \cdot \frac{1}{3 x} \cdot 3+\ln (3 x)=1+\ln (3 x)")
17. }{\mathrm{x}}\right)=\frac{\mathrm{x} \cdot \frac{1}{\mathrm{x}}-\ln (\mathrm{x}) \cdot 1}{\mathrm{x}^{2}}=\frac{1-\ln (\mathrm{x})}{\mathrm{x}^{2}}")
19. ^{1 / 2}\right)\right)=\frac{1}{(5 \mathrm{x}-3)^{1 / 2}} \cdot \mathrm{D}\left((5 \mathrm{x}-3)^{1 / 2}\right)=\frac{1}{(5 \mathrm{x}-3)^{1 / 2}} \cdot \frac{1}{2} \cdot(5 \mathrm{x}-3)^{-1 / 2} \cdot \mathrm{D}(5 \mathrm{x}-3)=\frac{5}{2} \cdot \frac{1}{5 \mathrm{x}-3}")
21. ))=\{-\sin (\ln (\mathrm{w}))\} \frac{1}{\mathrm{w}}=\frac{-\sin (\ln (\mathrm{w}))}{\mathrm{w}}")
23. )=\frac{1}{2(\mathrm{t}+1)}")
25. }\right)=5^{\sin (x)} \ln (5) \cos (x)")

+\tan (\mathrm{x}))=\frac{1}{\sec (\mathrm{x})+\tan (\mathrm{x})}\left(\sec (\mathrm{x}) \tan (\mathrm{x})+\sec ^{2}(\mathrm{x})\right)=\sec (\mathrm{x})")
29. =\ln (\mathrm{x}), \mathrm{f}^{\prime}(\mathrm{x})=\frac{1}{\mathrm{x}}") . Let
. Let )") . Then we must satisfy
. Then we must satisfy =\frac{1}{\mathrm{p}}(\mathrm{x}-\mathrm{p})") with
with  and
and =-1") so
so  and
and ") .
.
31. =100\left(1+A e^{-t}\right)^{-1} \cdot \frac{\text { d }}{\text { dt }} p(t)=100(-1)\left(1+A e^{-t}\right)^{-2}\left(A e^{-t}(-1)\right)=\frac{100 \mathrm{Ae}^{-t}}{\left(1+A e^{-t}\right)^{2}}") .
.
33. =8 \ln (x)+") any constant
any constant
35. =\ln (3+\sin (x))+") any constant
any constant
37. =\frac{3}{5} e^{5 x}+") any constant
any constant
39. =e^{x^{2}}+") any constant
any constant
41. =\ln (\sin (\mathrm{x}))+") any constant
any constant
43. A: , B:\left(t^{2}, 2 t^{2}+1\right)")
(a) When  is at
is at ") and
and  is at
is at . \quad") When
When  is at
is at , \mathrm{B}") is at
is at ")
(b) graph
(c)  for each, since
for each, since  .
.
(d)  so speed
so speed 
B:  so speed
so speed ^{2}+(4 \mathrm{t})^{2}}=2 \sqrt{5} \mathrm{t}.") At
At  speed is
speed is 
(e) This robot moves on the same path , but it moves to the right and up for about 1.57 minutes, reverses its direction and returns to its starting point, then continues left and down for another 1.57 minutes, reverses, and continues to oscillate.
45. When  WHen
WHen  .
.
47. =R(t-\sin (t)) \\ &y(t)=R(1-\cos (t)) \end{aligned}")
(a) graph
(b) ), \mathrm{dy} / \mathrm{dt}=\mathrm{R} \sin (\mathrm{t})") , so
, so }{1-\cos (\mathrm{t})}") .
.
When  , then
, then  so
so  and speed
and speed 
When  so
so  and speed
and speed ^{2}+0}=2 \mathrm{R}") .
.
49. (a) The ellipse ^{2}+\left(\frac{y}{5}\right)^{2}=1") .
.
(b) The ellipse ^{2}+\left(\frac{y}{B}\right)^{2}=1") if
if  and
and 
(c) ,-5 \cdot \sin (\mathrm{t}))") works.
works.
If  , the motion is oscillatory along the
, the motion is oscillatory along the  -axis. If
-axis. If  , the motion is oscillatory along the
, the motion is oscillatory along the  -axis.
-axis.